Alle, die das Nachbauen wollen, sollten mit ca. 500€ Hardwarekosten rechnen:
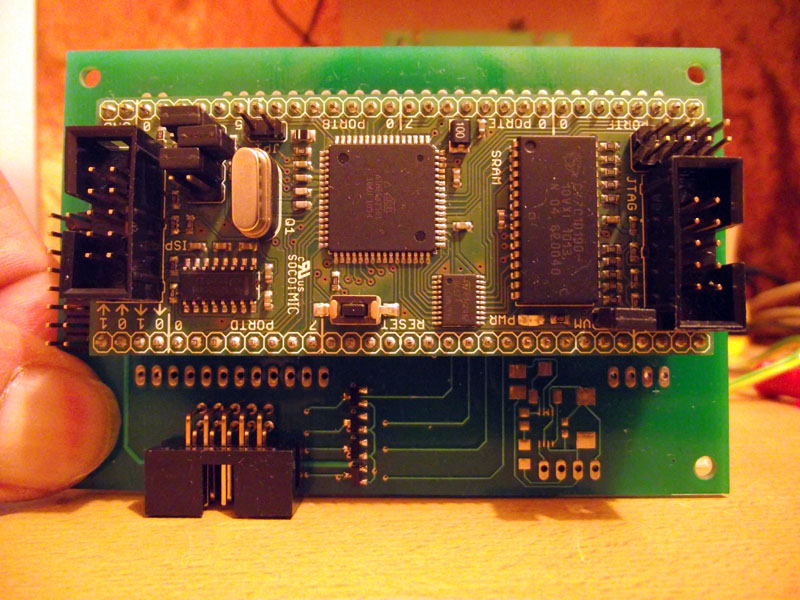
Ich verwende das AVR-Entwicklungsmodul mit 128 KByte externem SRAM
Modell: AL-ERAM128_256 Version 2.0
zu kaufen gibt es das Teil bei ALVIDI
Die Pinbelegung des ATmega2561 mit externen Ram:
Port B
0 Chip Select SD-Karte
1 SCK
2 MOSI
3 MISO
4 PWM3
5 PWM2
6 PWM1
7 PWM0
PORT D
0 Serial Out Clock
1 Serial Out Data Write
2 RXD1
3 TXD1
4 Serial Out Data
5 Serial In Clock
6 Serial In Data Read
7 Serial In Data
Port E
0 RXD0
1 TXD0
2 Motorrichting 1
3 Motorrichting 2
4 Motorrichting 3
5 Motorrichting 4
6 Interrupt Touch-Panel
7 SD-Karte dedect
Port F
0 ADC 0
1 ADC 1
2 ADC 2
3 ADC 3
4 ADC 4
5 ADC 5
6 ADC 6
7 ADC 7
Port G
3 Chip Select Touch-Panel
4 Chip Select LCD
5 Sound Ausgang
Port A, Port C und ein Teil von Port G sind für den externen Ram reserviert.
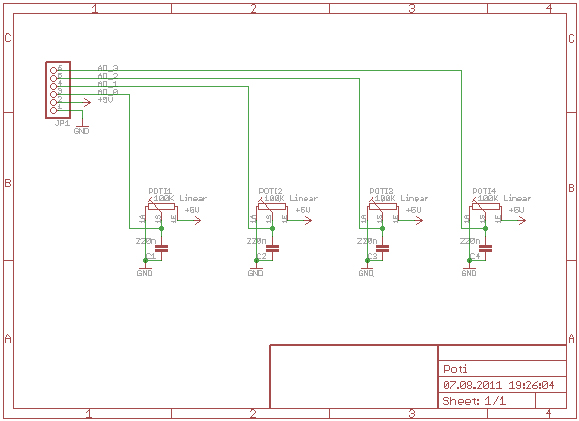
Hier ist die Schaltung.
Die 4 Analogeingänge werden über den Spannungsteiler 100K, 39K und den Schutzdioden
BAT54S den ADC4 bis 7 zugeführt. Damit können Spannungen von bis zu 17 Volt gemessen werden.
So ist es möglich, auch die in der Industrie verwendeten 0 bis 10 Volt zu verarbeiten.
An JP1 wird das LCD 1 zu 1 angeschlossen.
Das verwendete LCD ist ein MI0283QT-2 Display mit TouchPanel (2.8", 240x320 Pixel).
Erstanden bei Watterott electronic
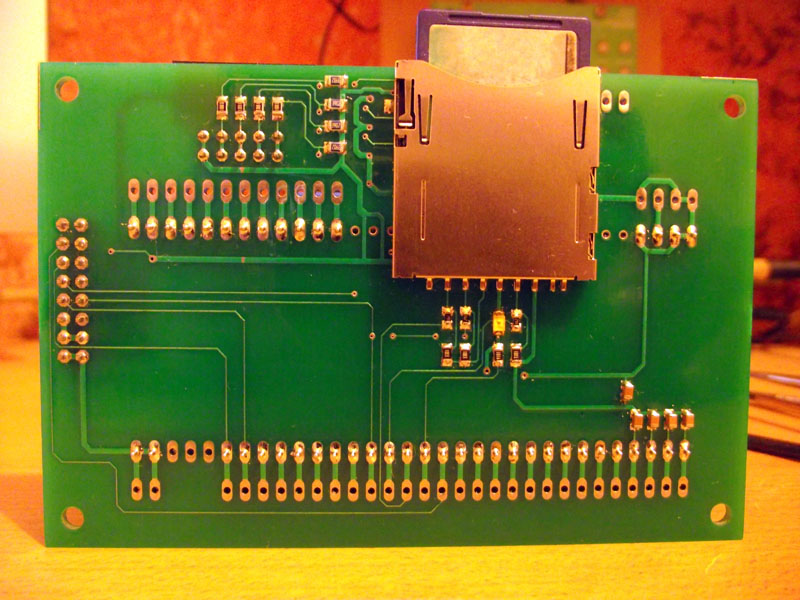
Noch die SD-Kartenbeschaltung am Controller.
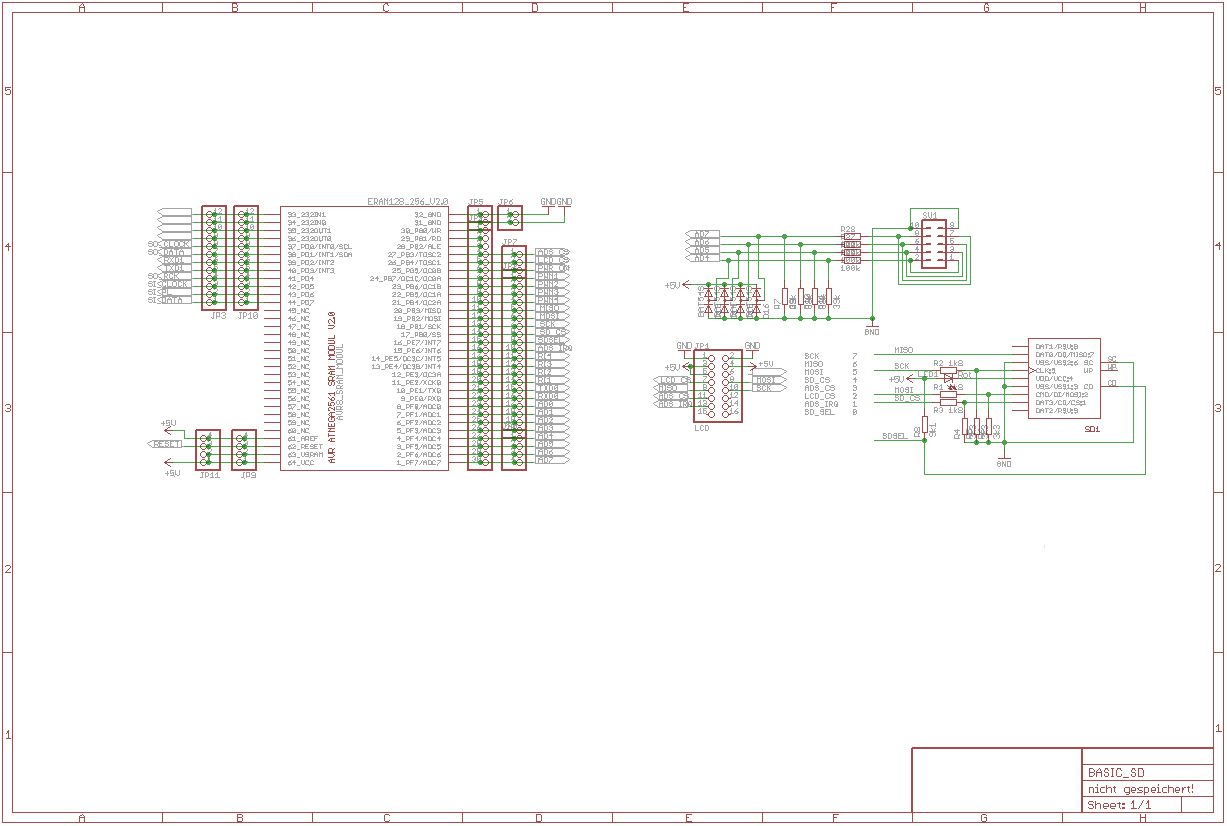
Die SD-Karte ist auf der Rückseite platziert.
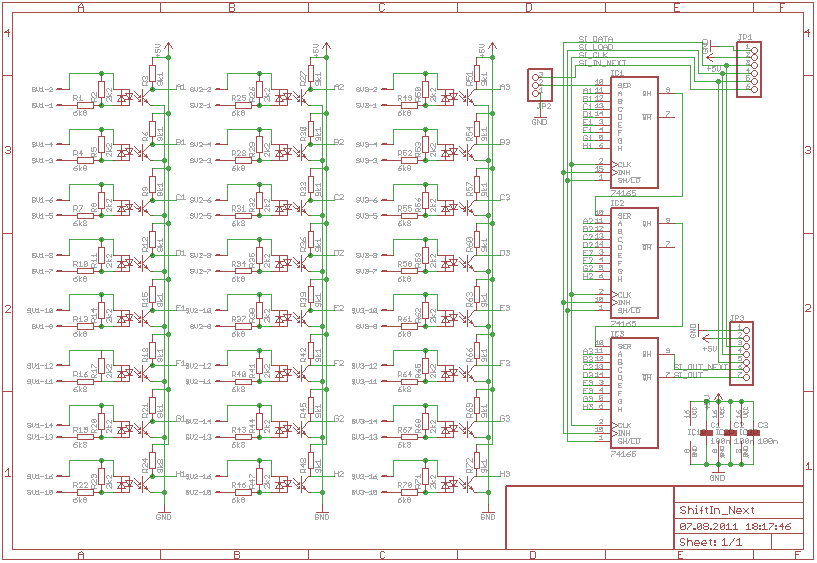
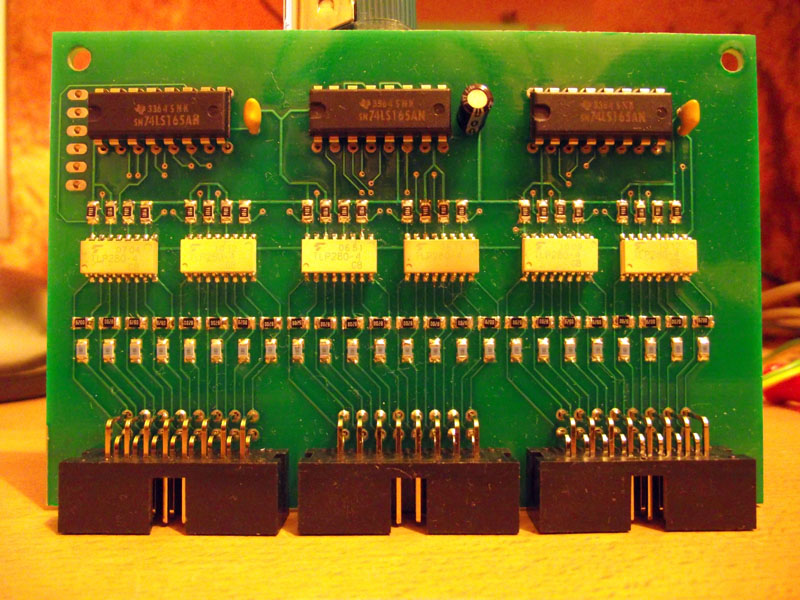
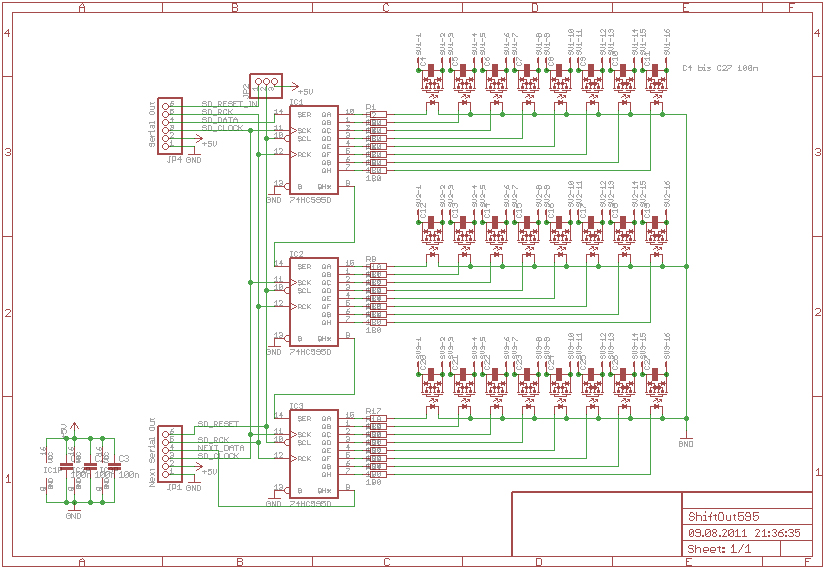
Ja, die Ports fehlen. Da diese auch wichtig sind, muss eine Porterweiterung her.
Für die Inputs sind 74165 zum Einsatz gekommen.
Nachteil... bei zu hoher Spannung an den Eingängen ist der Controller gefährdet.
Daher sind Optokoppler (TLP280-4) vorgeschaltet.
Low ist 0 bis 4 Volt.
Ein High wird ab 5 Volt erkannt und ist bis zu 18 Volt erlaubt.
Die Schaltung berücksichtigt auch die Negation der Signale.
Diese soll nun betrachtet werden.
Am Eingang des TLP280-4 ist LOW, der Transistor ist gesperrt.
Über den 9,1K Widerstand liegen 5 Volt am Eingang des 74165.
/QH des 74165 negiert das Signal wieder zu LOW.
Das Ausgangssignal ist folglich auch das Eingangssignal.
Da die Module Kaskadierbar sind (maximal 3 Stück), muss das erste Modul
über den Jumper JP2 an GND gelegt werden. Weiterhin ist QH mit den Eingang
des nächsten Modul an SER zu verbinden. Das letzte Modul liefert /QH an den Controller.
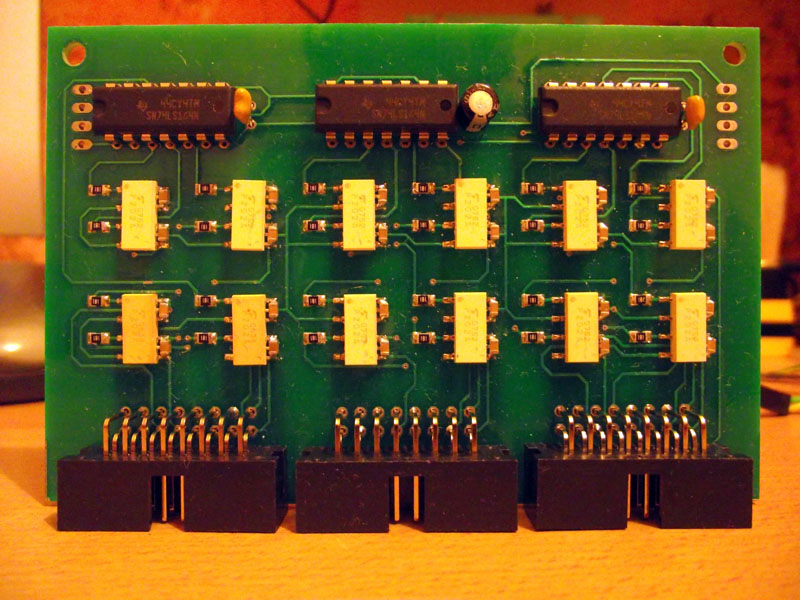
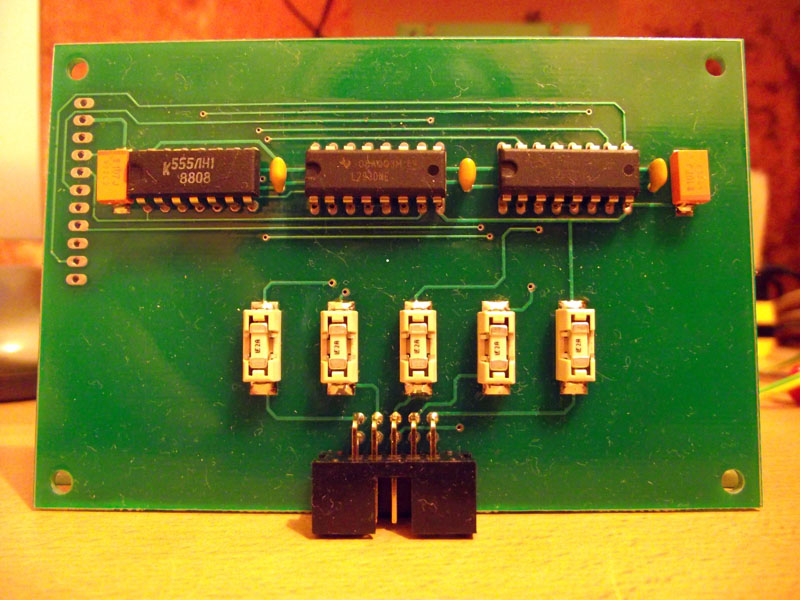
Das ist noch ein alter, also Prototyp Aufbau.
Die Output - Seite wurde zuerst mit 74164 aufgebaut.
Da klappern die Ausgänge beim schieben und können dadurch Störungen verursachen.
Also wurden diese durch den 74595 ersetzt.
Auch hier sind die Ausgänge geschützt. Dafür müssen die Solid-State Relais (TLP202) herhalten.
Mit einer Schaltleistung von 400 mA pro Kanal kann einiges bewegt werden.
Die Resetfunktion an JP2 habe ich an 5 Volt liegen, da das Programm für einen definierten Zustand sorgt.
Auch hier sind die Module bis zu 9 Port Kaskadierbar.
Auch hier ist es ein alter Aufbau.
Der ATmega2561 bietet 8 AD-Wandler, davon sind Kanal 0 bis 3
für die Steuerung der 4 PWM Kanäle vorgesehen.

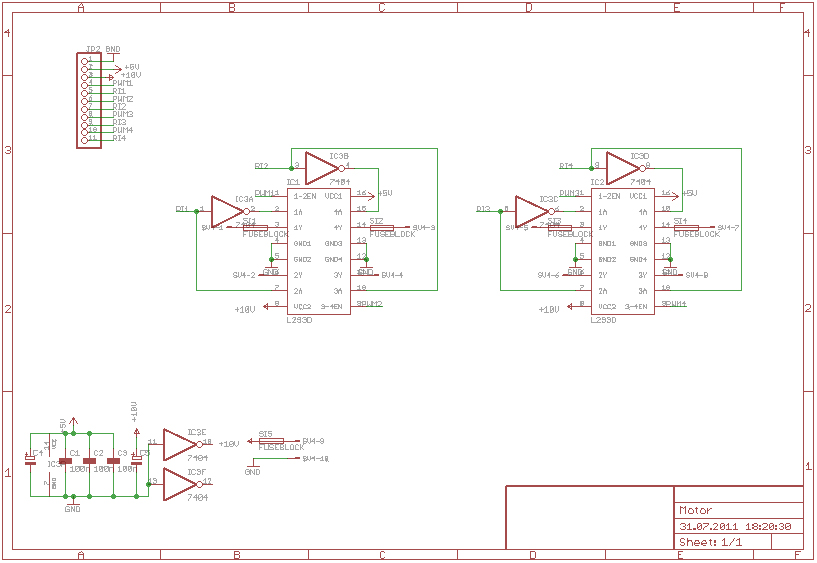
Die Motorenschaltung wird nicht benötigt.
Mein Sohn möchte eine kleine Eisenbahn (Spur Z)) steuern.
Dazu ist diese Schaltung da. Die 4 PWM Ausgänge liegen am EN-Eingang der L293D
und sind für die Geschwindigkeit da. Mit RI wird die Richtung der Loks festgelegt,
so als würde man am Fahrregler drehen.
Die Steuerung der Loks und Weichen wird über das Basicprogramm realisiert.
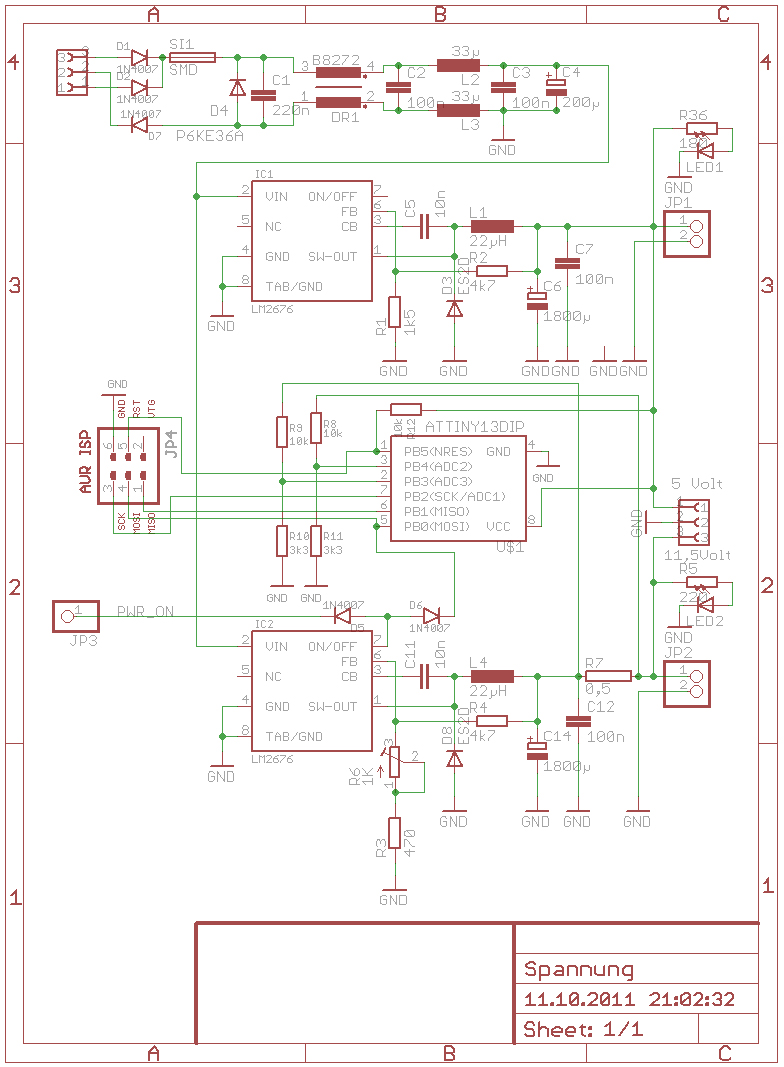
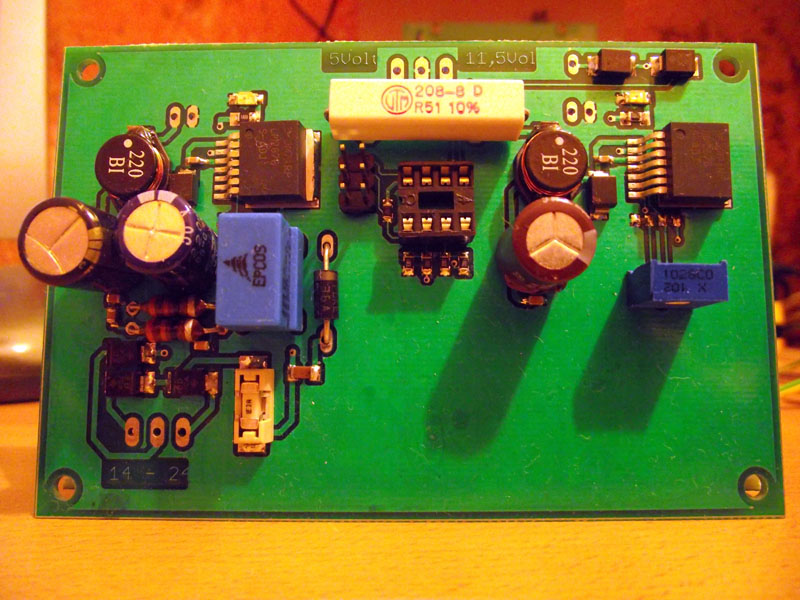
An der Stromversorgung ist nix besonderes.
Einen Linearregler will ich nicht nehmen, da die Verlustleistung recht hoch ist.
Ich verwende den LM2676ADJ, der Lasten bis 3A versorgen kann .
Der "Fahrstrom" wird auf Kurzschluss überwacht und im Bedarfsfall abgeschaltet.
Wie kommen die Programme da rein?
Da gibt es die Variante mit der RS232.
Ich selbst verwende eine Tastatur aus einem Atari Portfolio.
An der war die Tastaturfolie "verbraucht" und wurde durch
Tasten ersetzt.

Wenn Fragen auftauchen, beantworte ich die gern per eMail:

Home